目录 更新时间:2026-07-02 14:16
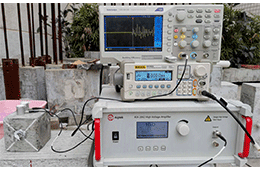
实验名称:功率放大器在压电致动器开环实验特性研究中的应用实验目的:为了验证直驱-惯性驱动双模式结合实现大行程与高分辨力兼顾以及纵扭转换致动的可行性并评估本文提出的新型旋转压电致动器的机械输出特性,搭建了开环实验系统,并提出了角位移的间接测量方案。利用搭建的实验系统对致动器扭转致动单元和致动器整机的机械输出特性进行了详细的测试研究。实验设备:信号发生器,位移传感器,ATA-4052高压功率放大器,计算机,处理器等。实验过程:为了提出的纵扭转换型跨尺度旋转压电致动器开展开环实验特性的研究,搭建了如图所示的开环实验系统。其中,DG4162功能信号发生器以及ATA-4052功率放大器,用于产生激励样机的电压信号;高精度激光位移传感器LK-HO20和信号处理器L... ... 查看全文>

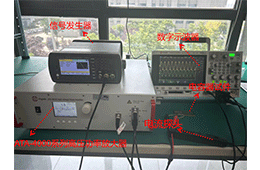
实验名称:功率放大器基于压电主动传感技术健康监测方法中的应用实验目的:验证压电陶瓷传感器的时间反演法能够有效地对螺栓球节点连接区的连接状态和受力状态进行监测。实验设备:功率放大器ATA-2022H,压电陶瓷,螺栓球,套筒,数据采集卡,电脑。实验内容:本实验将利用压电陶瓷传感器,通过模型试验,对基于时间反演技术的螺栓球节点连接区健康状态监测方法进行实验,时间反演聚焦信号的峰值只与该信号在结构上传递时所经过的传播路径的传递函数有关,当螺栓球节点内部螺栓发生损坏或未安装到位(受损状态)时,相当于传递函数发生改变,聚焦信号的峰值也会发生改变。实验过程:试验过程中,信号经功率放大器放大后对压电陶瓷传感器进行激励,该信号经由螺栓球和套筒传递到杆件,杆件上的PZT2... ... 查看全文>

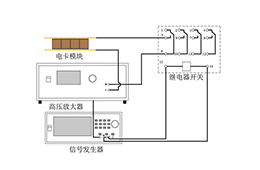
实验名称:电卡制冷器件极化测试 研究方向:近年来,温室效应所造成的全球变暖极端气候正逐步威胁着地球生态和人类生活,也迫使传统制冷行业开始探索新的制冷技术。基于电卡效应的固态制冷技术作为一种清洁、高效、驱动方式简单的新型制冷技术,有望替代传统蒸气压缩式制冷,并应用于电子元件散热领域。与此同时,在微电子领域,随着科技水平的不断进步,用户对电子设备的微型化、复杂化和轻量化要求逐渐提高,使得芯片上电子元件的尺寸越来越小而集成度越来越高。。磁热制冷、电卡制冷、弹热制冷、压热制冷技术均可被归纳为基于固态热效应(caloriceffect)的制冷技术,即通过外部场强(磁场、电场、应力场)的变化驱动固态热材料(caloricmaterial)产生吸热和放热的效果... ... 查看全文>
【概述】本研究中使用ATA-2031高压放大器,搭建声空化微流控器件实验系统。为满足生物医药领域对小粒径脂质体药物高效、可控制备的严苛需求,克服传统脂质体制备方法存在的粒径分布广、需高流率比导致药物浓度降低、工艺繁琐等局限,本研究设计并研制了声空化微流控器件。通过仿真优化、器件制造与性能测试、工艺参数优化及生物医学应用验证,证实了该器件在制备粒径均一、包封率高且生物性能优异的小粒径脂质体药物方面的可行性,为脂质体药物的临床应用与商业化生产提供了新路径。实验名称:用于制备小粒径脂质体的声空化微流控器件研究实验目的:本研究旨在通过超声换能器振动模态仿真、微流控混合与声压分布模拟、样机加工与性能测试,验证所设计的声空化微流控器件在调控脂质体粒径、提升混合效率... ... 查看全文>

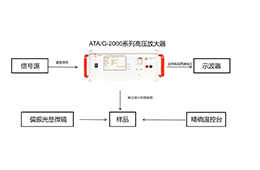
【概述】南京邮电大学研究团队使用ATA-2022B高压放大器,搭建光通信实验系统。实验名称:电压放大器在可见光通信LED驱动中的应用研究方向:可见光通信实验内容:提出了亚波长理想LED模型,即器件的厚度小于发光波长。通过兼容工艺在同一块垂直结构外延片上集成了光发射和光接收器件,验证了器件减薄后可以有效抑制横向串扰,能够实现同时的音视频收发通信。测试设备:激光光源,信号发生器,示波器,电压放大器(ATA-2022B,Aigtek)),探测器等。实验过程:图1:实验测试原理图及实物图系统示意图和实验装置如图所示。在视频链路中,摄像头采集到的视频信号经过高压放大器(ATA-2022B、Aigtek)放大后,通过Bias-Tee与直流电源进行混频,混频后的信号... ... 查看全文>

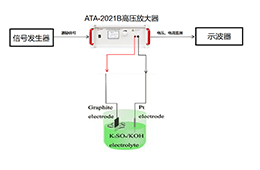
实验名称:石墨烯制备 研究方向:目前,许多各种各样的传感器已经被用于智能化检测设备,这些传感器多数基于硅衬底,例如硅基压力传感器,硅基温度传感器,硅基湿度传感器和硅基热风速传感器等。其应用领域早已涉及到诸如生产自动化、海洋开发、智能家居、现代信息、军事通讯等方方面面。传感器在某种程度上可以说是决定一个系统特性和性能指标的关键因素。不同的需求,也对应不同的传感器来满足其要求的精度,稳定性和耐久性。如今,对于基于硅衬底的应变传感器的研究遭遇瓶颈,这是由于传统硅基电子器件的刚性、脆性、易碎等缺点造成的。而目前在多种场合,需要传感器具有柔韧性,稳定性和拉伸性等特点,所以利用新物质新材料来制备高性能应变传感器的探索已经亟不可待。然而,要使传感器、电极材料和... ... 查看全文>
【概述】某研究团队使用高压放大器,搭建聚合物研究系统。实验名称:胆甾液晶的光学性能,其反射谱、透射谱以及在不同条件下的光学响应研究研究方向:可见光透过率可调的mnSmart窗因其易于控制、外观美观、显著提高建筑居民的舒适度而受到学术界和工业界的广泛关注,并已应用于建筑、交通、电子或光学器件等各个领域。聚合物分散液晶(PDLC)作为智能窗户已经得到了广泛的应用。由于液晶分子组成的液滴的光轴是自由取向的,通过基体的光被液滴散射明显,由于它们的折射率不匹配,呈现不透明的乳白透明状态。LC分子在带电状态下与电场排列一致,呈现透明。与PDLC相比,聚合物稳定液晶(PSLC)倾向于形成具有节点或纤维构象的松散聚合物网络。据文献报道,PSLC可以在透明或不透明状态下... ... 查看全文>
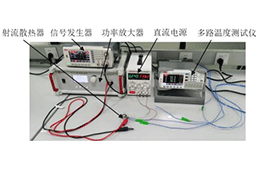
【概述】某研究团队使用电压放大器,搭建压电射流散热器实验系统。在现代电子器件中,芯片的热管理一直是一个关键问题。随着电子设备尺寸的不断减小和功率密度的增加,传统的散热方法已经难以满足需求。因此,研究人员开始探索新的散热解决方案。目前合成射流散热技术具有低能耗、无转动部件、结构简单等优势,在电子芯片散热方面具有研究潜力。合成射流压电泵作为一种微型气泵,利用压电激励器的往复运动带动周边气体进行泵送,在提高散热效率的同时,也能够降低能耗,减小体积,适应了电子设备小型化、高性能化的发展趋势,在芯片主动散热方面具有广阔的应用前景。关于压电驱动的相关实验研究,安泰电子的ATA-2000系列电压放大器在该领域中,有较为广泛的应用,ATA-2000系列最大可以输出16... ... 查看全文>
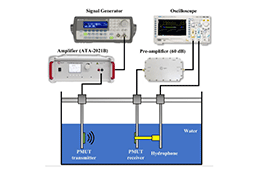
【概述】某研究团队使用电压放大器,搭建声纳成像实验系统。超声波换能器在声纳成像系统中起着重要作用,因为它有助于实现电信号和声信号的相互转换。对于声纳成像设备,超声换能器通常由块压电陶瓷制成,并在厚度振动模式下工作。随着微机电系统(MEMS)技术的快速发展,微超声换能器(MUT)应运而生。由于MUT具有小尺寸、批量模式生产和CMOS工艺兼容性,并且可以很容易地与先进的封装技术进行阵列,许多研究人员已经探索了其替代传统超声换能器的应用。与PZT相比,AlN不含有毒铅,并且与CMOS技术兼容。虽然它的压电系数比PZT小一个数量级,但其介电常数小两个数量级,理论上,AlNPMUT的接收灵敏度比PZTPMUT高一个数量级。因此,AlNPMUT具有替代声纳成像接收... ... 查看全文>

西安安泰电子科技有限公司(Aigtek)是国内领先从事测量仪器研发、生产和销售的高科技企业!
猜你喜欢